この世界は3次元で成り立っています。当たり前のことなので、自分たちがこの世界をどのように知覚しているのかについて気に留める人はほとんどいません。しかしどうでしょう。実際、私たちの2つの目はカメラのように平らな画像を取り込みます。そして、なんと脳内で、この2枚の2次元画像から3次元の感覚を形成しているのです。
今日、3次元のこの世界を操作するべく、ますます多くのことをデジタルシステムに要求しています。たとえば、ジェスチャー操作の解釈、顔認識の実行、車の自動運転などを行っています。このように3次元を操作するには、奥行きを知覚する人間の能力の一部をデジタルシステムに搭載する必要があります。
奥行き感知
デジタルイメージングにおける3Dセンシング(奥行き感知)では、三角測量と飛行時間型(ToF)測定という2つの基本的な方法を使用します。また、これらの技法を組み合わせることもあります。
三角測量は幾何学に基づいています。三角測量の1つの形式である立体視は、人間の両眼による立体視と同じ仕組みです。私たちの目は2つあり、それぞれが水平方向で離れています。つまり、それぞれの目はわずかに異なる角度から世界を見ています。この視点の違いが視差を生み出します。つまり、ある背景を基準にした物体の位置は、右目で見るのと左目で見るのとで変わります。脳はこの視差の情報を利用して、視野において物体の奥行き(距離)を感知し、一つに統一された3次元の感覚を生み出します。
しかし、立体視は照明条件に左右される場合があり、表面に独特な質感が必要です。このため、信頼性の高い立体視の実装は困難です。コンピュータのビジョンシステムでは、その代わりに別の形の三角測量を使用して「構造化光」を頼ります。このような変わった名前になったのは、あるパターン(一連の線や多数の点光)を物体に投影し、わずかに異なる角度からこのパターンのゆがみを分析するためです。こちらの方が、本来の立体視を再現するよりも処理能力が低くて済むため、コンピュータで奥行き情報を迅速に計算して3Dシーンを再構築できます。

ある形式の三角測量の奥行き感知では、構造化光パターンをシーンに投影し、イメージングシステムがこのパターンのゆがみを分析して、照明された領域の奥行情報を導出します。
三角測量法は、表面の高分解能マッピングに秀でています。短距離で最適に動作するため、顔認識のような技術で非常に有用です。
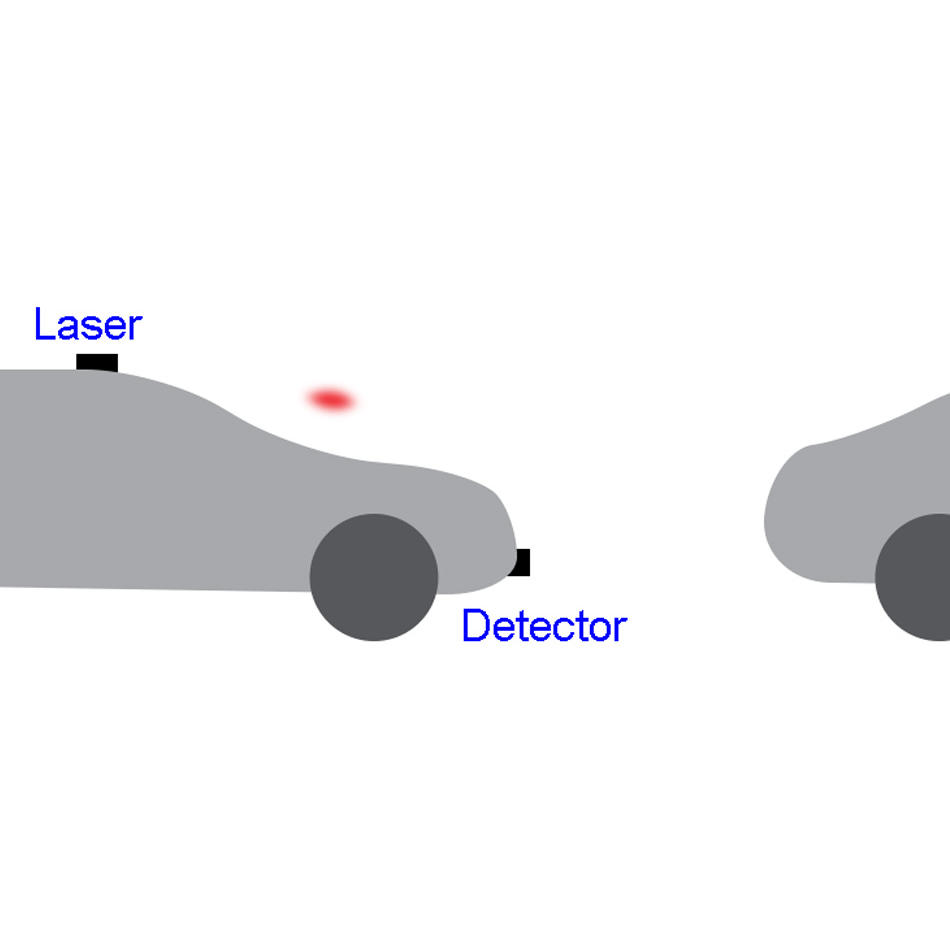
飛行時間型イメージング(ToF)には2つの形式があります。「直接飛行時間(dToF)」では、シーンが光のパルスで照明され、反射光パルスの戻り時間が測定されます。光の速度は分かっているため、この戻り時間は距離に直接変換できます。この計算を画像のピクセルごとに独立して実行すると、シーンの各ポイントにおける奥行きの値を導出できます。
2番目の形式のToFは「間接飛行時間(iToF)」です。ここでは、照明は連続した変調信号です。測定されるのは、戻り光における、この変調の位相変動です。このデータを用いて物体の距離が計算されます。
ToF技術は、広い領域と長い距離で迅速に測定する能力に長けています。このため、バーチャルリアリティのヘッドセットにおける部屋のスキャンや、ロボット操作の障害物検出のような技術に最適です。

直接飛行時間感知では、光パルスの往復移動時間を測定し、その時間を距離測定値に変換します。
3Dセンシングの光源の要件
三角測量とToF 3Dセンシングのどちらの方法でも、有効性と精度を決める上では、光源の特性がきわめて重要です。それぞれに固有の照明要件がありますが、共通の要件もあります。
三角測量は、可干渉性の光源と相性がいいです。この光源では、作り出すことができるパターンの点で柔軟性が増します。高分解能の構造化パターンを形成して、長距離にわたってパターンの整合性を維持することもできます。
三角測量の光源には、安定したビーム位置という特性も求められます。ビーム位置に変動があると、奥行きの測定精度が落ちてしまうことがあります。
ToFシステムには、短くて正確な光のパルス(dToF)または高周波数で変調可能な連続出力(iToF)のいずれかを放射できる光源が必要です。正確に距離を測定するには、パルスのタイミングと変調周波数が正確であって、立ち上がり時間と立ち下がり時間が短いことが最重要になります。
ToFシステム、特にフラッド照明を使用して広領域か長距離をカバーするものでは、一般的に、三角測量システムよりも高い出力が求められます。これにより、戻り光が十分に強くなって検出可能となり、周辺光が高レベルでもシステムが適切に機能します。
また、出力が高まるにつれて重要になるのが、電力効率(入力電力に対する光出力の比率)です。ポータブル(電池式)機器では、電力効率が特に重要になります。
奥行き感知を高めるレーザ
半導体レーザは、他のどの光源よりも、このような要件(三角測量とToF感知の両方)に一致します。過去には発光ダイオード(LED)が一部の3Dセンシングの用途に採用されていました。すぐに利用できて比較的に安価であるためです。しかし、3Dセンシングシステムの性能と効率に対する要件が高まると、LEDはあまり評価されなくなりました。
その理由の一つは、半導体レーザが、狭スペクトル出力、干渉性、輝度という特性を独自に組み合わせることができるからです。これは、精度とコントラストが高くて安定した構造化光パターンの生成に最適です。
また、レーザの狭スペクトル出力では、検出システムにおける周辺光の除外が非常に簡単になります。これにより、太陽光やその他の照明が明るいシーンにおいて、あらゆる種類のセンシングシステムの性能が改善されます。
半導体レーザの輝度を高めれば、帰還信号はさらに強まります。特にToFの用途では、これによってシャッター時間は短縮され、フレームレートは高くなり、反射率の高くない物体を確認する能力が改善されます。また、照明の明るいシーンにおいて性能が改善されます。LEDでは、強度が低いため、同レベルの精細さと深さの分解能を達成することは困難です。
また、半導体レーザは、消費電力とサイズの点でもLEDより優れています。小さいフォームファクターから強い信号を放射できるため、小型の電池式機器に最適です。
最後に、半導体レーザの切り替えと変調は、LEDよりも大幅に速く行うことができます。この迅速な変調により、高度なToF技法で精度を改善できるようになります。
3Dセンシングに秀でるCoherent
Coherentは3Dセンシング向け照射源の世界的大手であり、これまでに20億ユニット以上を出荷しました。当社のポートフォリオには、レーザ、光学レンズ、完全な照明モジュールが含まれます。
当社の光源には、垂直共振器面発光レーザ(VCSEL)、VCSELアレイ、端面発光半導体レーザ(EEL)があります。
特にVCSELアレイは、通常の出力が940 nmであり、今日の3Dセンシングで主流の光源になりました。これにはいくつかの理由があります。その1つは、光がEELのように側面から放出されるのではなく、機器の最上部のVCSELから放出されることです。基板で他の部品と簡単に統合できるのです。また、VCSELは、3Dセンシングで使用される電力レベルにおいてEELよりも安価です。その結果、EELは、高性能のVCSELを使用できないような長い波長(1200 nm超)に限り、一般的に採用されるようになりました。これら長い波長の主な長所は、明るい太陽光で性能が堅牢になること(事実上すべての太陽光を除外可能)、および目の安全性が高いことです(近赤外波長と比較して10倍の電力レベルが可能)。
Coherentでは、6インチGaAsウェハに基づくVCSELとEELの製造のプラットフォームが成熟しています。当社は、この技術における生産量で優位に立ち、信頼性と性能が傑出した機器を常に提供できるのです。
3Dセンシング向け光源は、一般的にフラッドイルミネーターかパターンプロジェクターのいずれかとして構成されます。フラッドイルミネーターでは、特定の角度にわたって光の範囲が均質になります。顔認識やジェスチャー検出など、視野全体にわたって光の分布が均一であることが測定精度にとって重要である用途で使用されます。
パターンプロジェクターは、三角測量システムとToFシステムの両方で実際に使用されています。光のパターンとToFの測定を組み合わせると、信号対雑音比が改善され、マルチパスから誘発される測定誤差が下がります。このような誤差が発生するのは、光が複数の表面で反射してからセンサーに到達する場合です。
それぞれのケースでは、光学レンズが使用されてレーザ出力の形成と変換が行われ、その用途の厳密な要件が満たされます。フラッドイルミネーターは一般的に、比較的にシンプルで低コストの成型プラスチックレンズを使用して生産できます。しかし、構造化光源に対する要件はますます厳しくなっています。
Coherentは、回折光学素子(DOE)とメタオプティクスによって構造化光照明の要件を満たしています。メタオプティクスではナノ構造(光の波長よりも短い物理的特性)を活用し、伝播特性を変化させます。これには、ビーム形状、発散角、強度分布を変更すること、およびビームを分波して構造化光パターンを生成することが含まれます。
Coherentのメタオプティクスの長所として、ビームコリメーションや分波など、複数の光機能を単一で小型の要素に組み合わせ可能であることが挙げられます。これによって光学システムのサイズが縮小されて複雑さが低減され、3Dセンシングモジュールの全体的な性能も改善されます。
Coherentの主な差別化要因として、照明モジュールソリューション全体を設計して垂直統合する能力も挙げられます。この統合により、光源、光学レンズ、ドライバーIC、パッケージがすべて最適化され、シームレスに連携します。これにより、当社は信頼性が高く、性能も優れ、コストパフォーマンスに優れた製品を提供できます。要件の高い用途にも、大量に導入可能です。

Coherentでは、フラッド照明モジュールとドットプロジェクションモジュールを製造しています。
たとえば、当社の3Dセンシング向け照明モジュールは、電子寄生(不要な静電容量、インダクタンス、抵抗)を最小限に抑えるように設計されています。高精度のToFセンサーが依存する、ナノ秒のパルス幅とサブナノ秒の立ち上がり/立ち下がり時間を提供するには、これが不可欠です。また、当社では目の安全を重視し、どのような状況でも機器と出力の完全性を監視して、光量が常に実証済みの安全レベル内に留まるような機能を統合しています。民生機器では必須の配慮です。
まとめますと、Coherentは単に優れた部品を提供している会社ではありません。Coherentには、3Dセンシング技術の複雑さを理解し、完全に統合されたソリューションを提供して機器の性能を強化し、ユーザーの安全を確保するチームがいて、お客様はこのチームからサポートを受けられます。当社と提携していただければ、当社の卓抜した製品だけでなく、当社が継続的に開発しているフォトニックイノベーションをご活用いただけます。
Coherentの3Dセンシング向け製品について詳しくは、こちらをご覧ください。